
Nema 34 (86 mm) Hybrid-Kugelumlaufspindel-Schrittmotor

>> Kurzbeschreibungen
| Motortyp | Bipolarer Schrittmotor |
| Schrittwinkel | 1,8° |
| Spannung (V) | 3 / 4,8 |
| Strom (A) | 6 |
| Widerstand (Ohm) | 0,5 / 0,8 |
| Induktivität (mH) | 4 / 8,5 |
| Anschlussdrähte | 4 |
| Motorlänge (mm) | 76 / 114 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 max. |
| Spannungsfestigkeit | 1mA max. @ 500V, 1KHz, 1Sek. |
| Isolationswiderstand | 100 MΩ min. @500Vdc |
Der Schrittmotor mit Kugelumlaufspindel wandelt mithilfe einer Kugelumlaufspindel eine Drehbewegung in eine lineare Bewegung um. Die Kugelumlaufspindel verfügt über verschiedene Kombinationen von Durchmesser und Steigung, um unterschiedlichen Anwendungsanforderungen gerecht zu werden.
Kugelumlaufspindel-Schrittmotoren werden typischerweise in Anwendungen eingesetzt, die eine hochpräzise lineare Bewegung, eine lange Lebensdauer und einen hohen Wirkungsgrad erfordern, wie z. B. industrielle Automatisierung, Halbleitergeräte usw.
ThinkerMotion bietet ein komplettes Sortiment an Kugelumlaufspindel-Schrittmotoren (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) mit einem Lastbereich von 30 N bis 2400 N und verschiedenen Qualitäten (C7, C5, C3) von Kugelumlaufspindeln. Auf Anfrage können individuelle Anpassungen vorgenommen werden, z. B. Schraubenlänge und -ende, Mutter, Magnetbremse, Encoder usw.
>> Zertifizierungen

>> Elektrische Parameter
| Motorgröße | Stromspannung/ Phase (V) | Aktuell/ Phase (A) | Widerstand/ Phase (Ω) | Induktivität/ Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8.5 | 4 | 2500 | 5000 | 114 |
>> 86E2XX-BSXXXX-6-4-150 Standard-Außenmotor-Umrisszeichnung
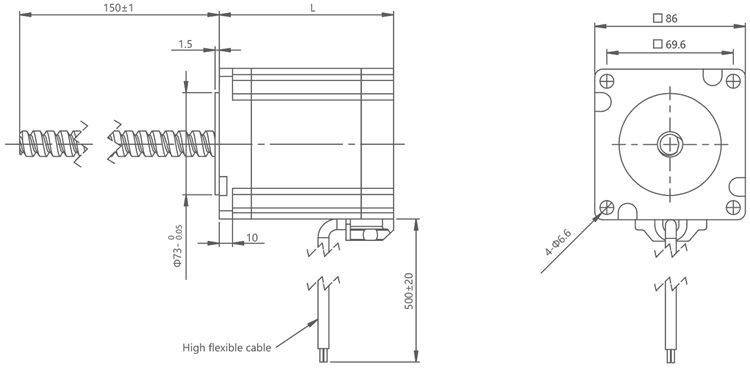
NAnmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
Bitte kontaktieren Sie uns für weitere Spezifikationen für Kugelumlaufspindeln.
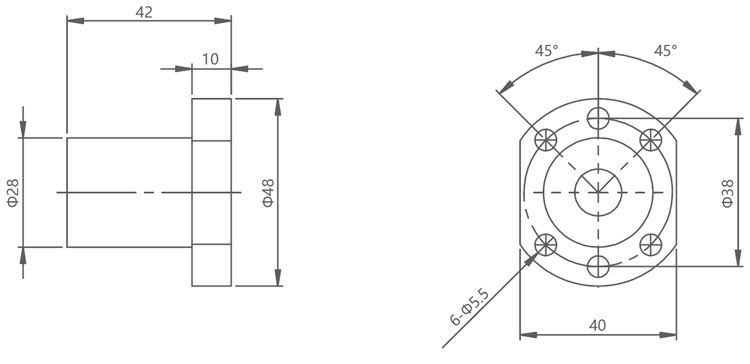
>> Kugelmutter 1605 Umrisszeichnung
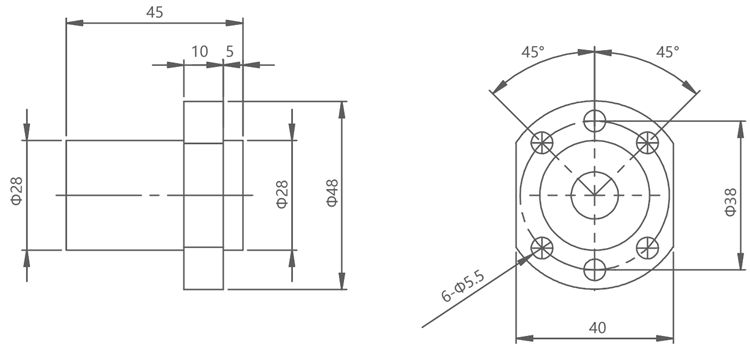
>> Kugelmutter 1610 Umrisszeichnung
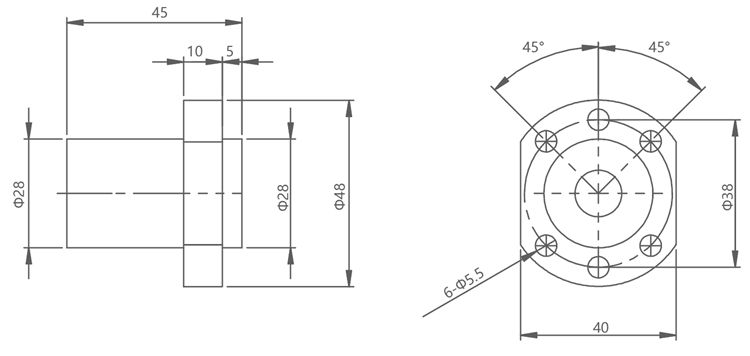
>> Kugelmutter 1616 Umrisszeichnung
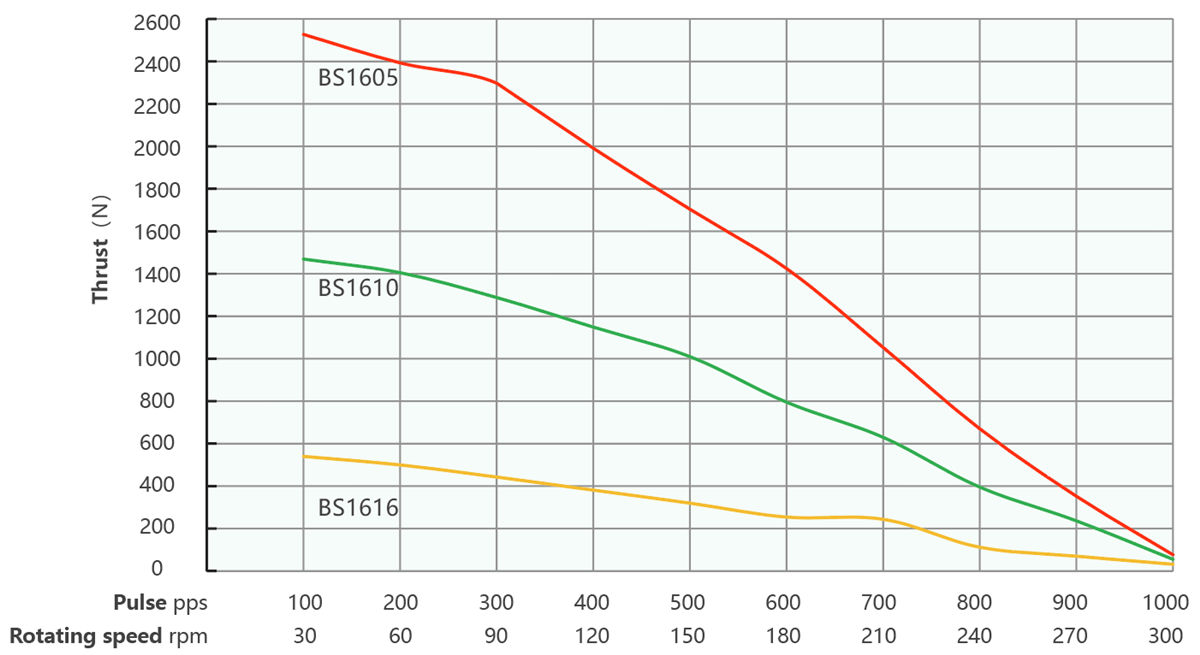
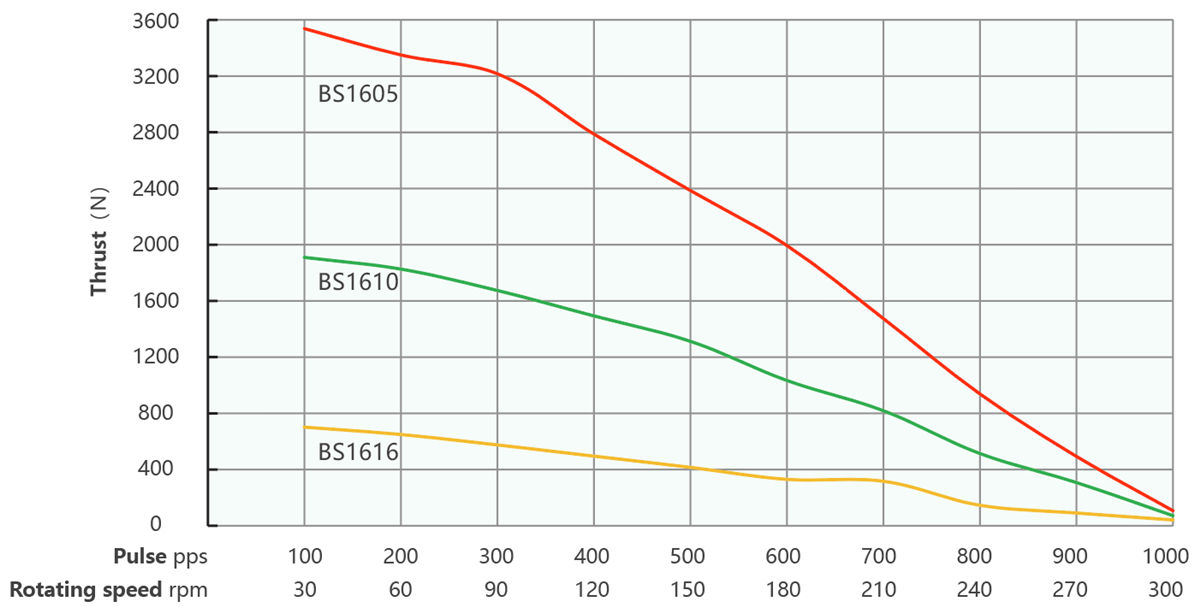
>> Geschwindigkeits- und Schubkurve
Bipolarer Chopper-Antrieb der Serie 86 mit 76 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
Bipolarer Chopper-Antrieb der Serie 86 mit 114 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | |||||||||
| 5 | 2.5 | 5 | 7.5 | 10 | 12.5 | 15 | 17.5 | 20 | 22.5 | 25 |
| 10 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 16 | 8 | 16 | 24 | 32 | 40 | 48 | 56 | 64 | 72 | 80 |
Testbedingung:
Chopper-Antrieb, keine Rampe, halber Mikroschritt, Antriebsspannung 40 V
Produktkategorien
-

Nema 14 (35 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 11 (28 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 8 (20 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 24 (60 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 17 (42 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 23 (57 mm) Hybrid-Kugelumlaufspindel-Schrittmotor