
Nema 23 (57 mm) Hybrid-Linearschrittmotor

>> Kurzbeschreibungen
| Motortyp | Bipolarer Schrittmotor |
| Schrittwinkel | 1,8° |
| Spannung (V) | 2,3 / 3 / 3,1 / 3,8 |
| Strom (A) | 3 / 3 / 4 / 4 |
| Widerstand (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Induktivität (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Anschlussdrähte | 4 |
| Motorlänge (mm) | 45 / 55 / 65 / 75 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 max. |
| Spannungsfestigkeit | 1mA max. @ 500V, 1KHz, 1Sek. |
| Isolationswiderstand | 100 MΩ min. @500Vdc |
>> Produktbeschreibung
Größe
20 mm, 28 mm, 35 mm, 42 mm, 57 mm, 60 mm, 86 mm
TJa
Extern, nicht gefangen, gefangen
STepper
0,001524 mm ~ 0,127 mm
PLeistung
Maximaler Schub bis zu 240 kg, geringer Temperaturanstieg, geringe Vibration, geringer Geräuschpegel, lange Lebensdauer (bis zu 5 Millionen Zyklen) und hohe Positionierungsgenauigkeit (bis zu ±0,01 mm)
AAnwendung
Medizinische Diagnosegeräte, Life-Science-Instrumente, Roboter, Lasergeräte, Analyseinstrumente, Halbleitergeräte, elektronische Produktionsgeräte, nicht standardmäßige Automatisierungsgeräte und verschiedene Arten von Automatisierungsgeräten
>> Elektrische Parameter
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (A) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4.5 | 4 | 480 | 950 | 75 |
>> Spezifikationen und Leistungsparameter der Leitspindel
| Durchmesser (mm) | Führen (mm) | Schritt (mm) | Selbsthemmende Kraft ausschalten (N) |
| 9.525 | 1.27 | 0,00635 | 800 |
| 9.525 | 2,54 | 0,0127 | 300 |
| 9.525 | 5.08 | 0,0254 | 90 |
| 9.525 | 10.16 | 0,0508 | 30 |
| 9.525 | 25.4 | 0,127 | 6 |
Hinweis: Bitte kontaktieren Sie uns für weitere Leitspindelspezifikationen.
>> 57E2XX-XXX-X-4-150 Standard-Außenmotor-Umrisszeichnung
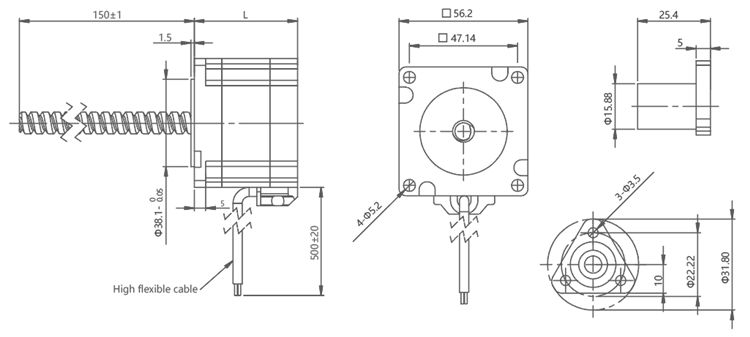
NAnmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
>> Umrisszeichnung des Standardmotors 57NC2XX-XXX-X-4-S
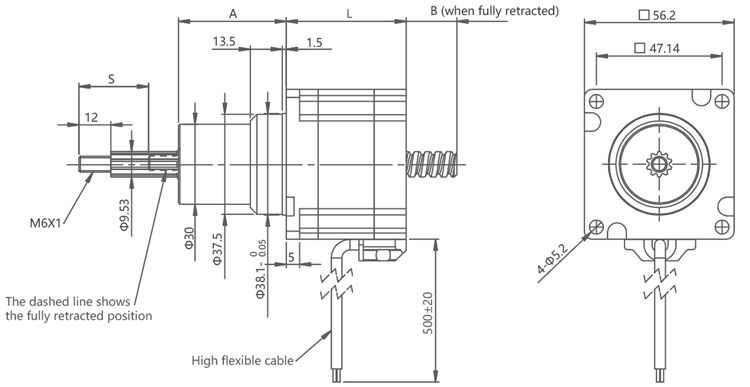
NAnmerkungen:
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
| Schlaganfall S (mm) | Maß A (mm) | Maß B (mm) | |||
| L = 45 | L = 55 | L = 65 | L = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0,2 | 0 |
| 38.1 | 49,5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63,5 | 74,9 | 51.9 | 42.9 | 31.9 | 21.9 |
>> 57N2XX-XXX-X-4-150 Standard-Motorumrisszeichnung ohne Gehäuse
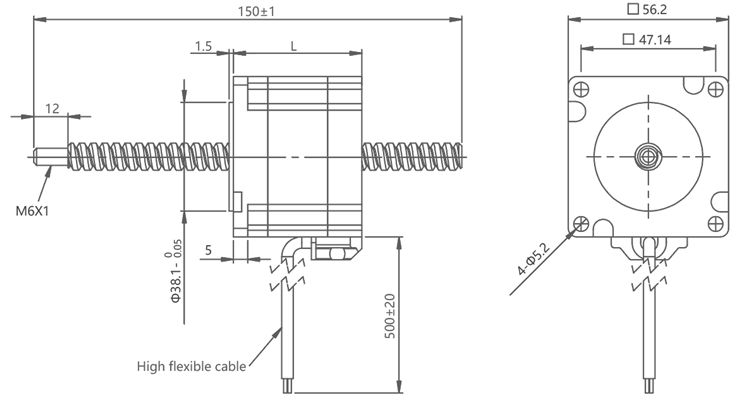
NAnmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
>> Umrisszeichnung des Elektrozylinders 57EC2XX-XXX-X-4-S
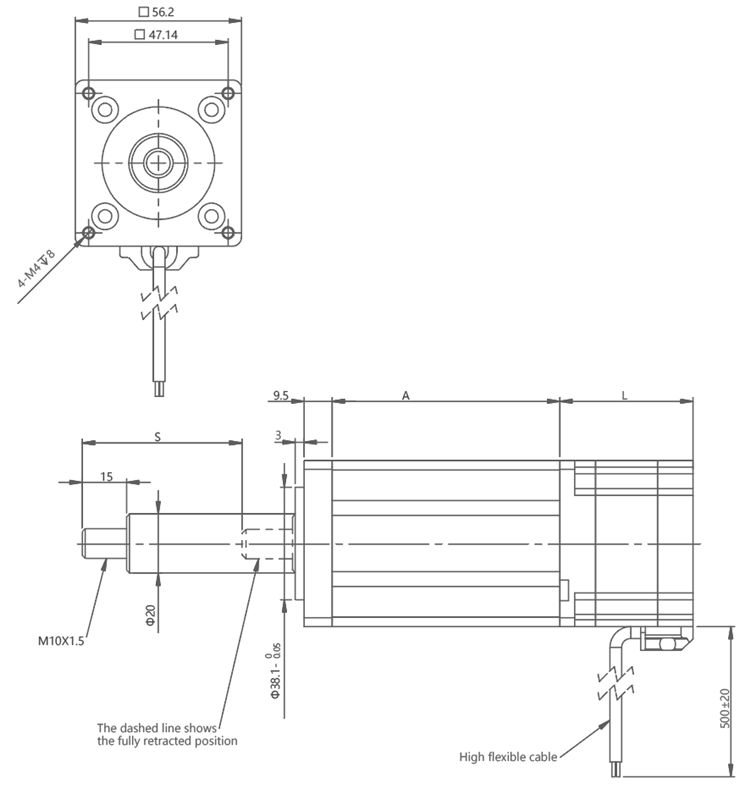
NAnmerkungen:
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
| Hub S (mm) | Maß A (mm) |
| 25 | 52 |
| 50 | 77 |
| 75 | 102 |
| 100 | 127 |
| 150 | 177 |
| 200 | 227 |
| 300 | 327 |
| 400 | 427 |
| 500 | 527 |
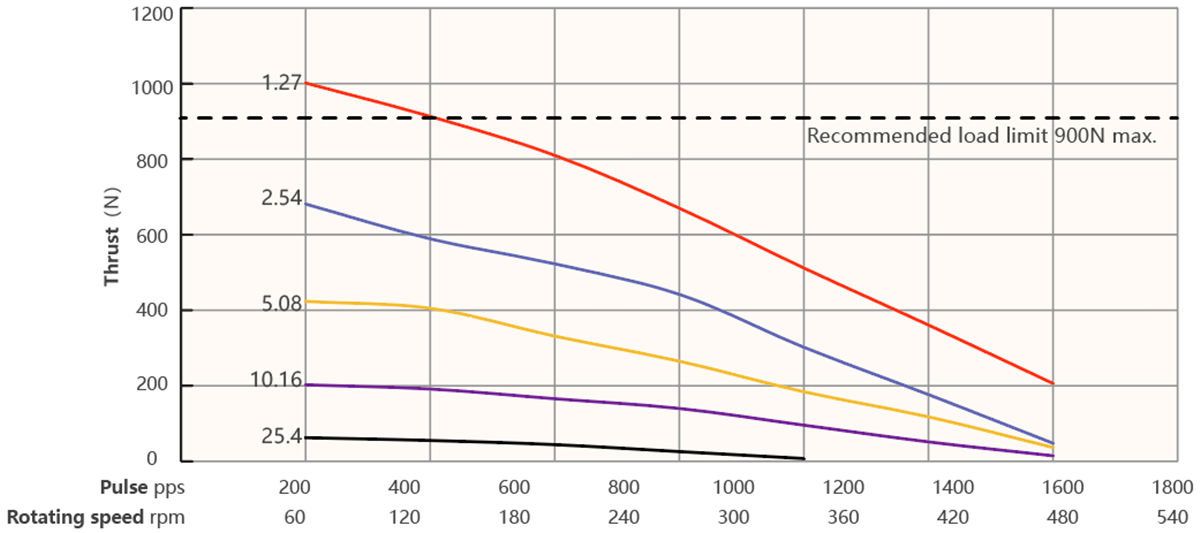
>> Geschwindigkeits- und Schubkurve
Bipolarer Chopper-Antrieb der Serie 57 mit 45 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ9,525 mm Leitspindel)
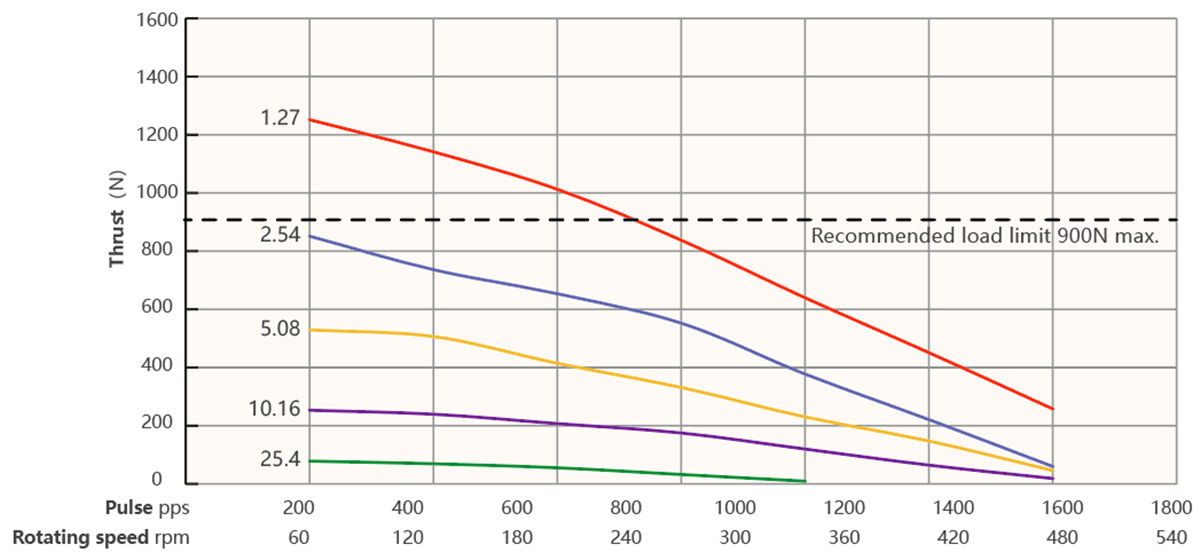
Bipolarer Chopper-Antrieb der Serie 57 mit 55 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ9,525 mm Leitspindel)
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | ||||||||
| 1.27 | 1.27 | 2,54 | 3,81 | 5.08 | 6.35 | 7.62 | 8,89 | 10.16 | 11.43 |
| 2,54 | 2,54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40,64 | 50.8 | 60,96 | 71.12 | 81,28 | 91,44 |
| 25.4 | 25.4 | 50.8 | 76,2 | 101,6 | 127 | 152,4 | 711,8 | 203.2 | 228,6 |
Testbedingung:
Chopper-Antrieb, keine Rampe, halber Mikroschritt, Antriebsspannung 40 V
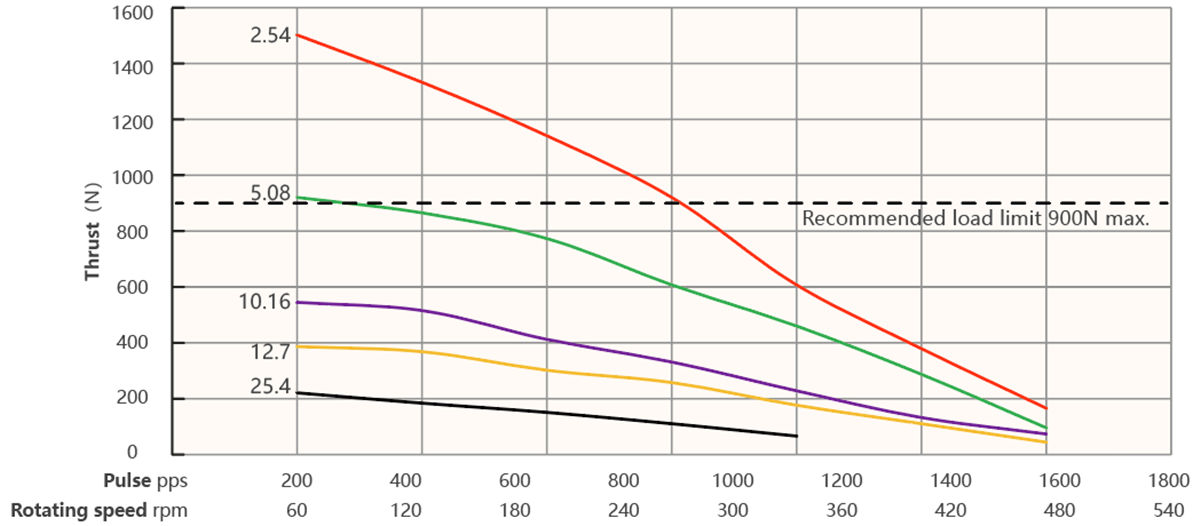
Bipolarer Chopper-Antrieb der Serie 57 mit 65 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ9,525 mm Leitspindel)
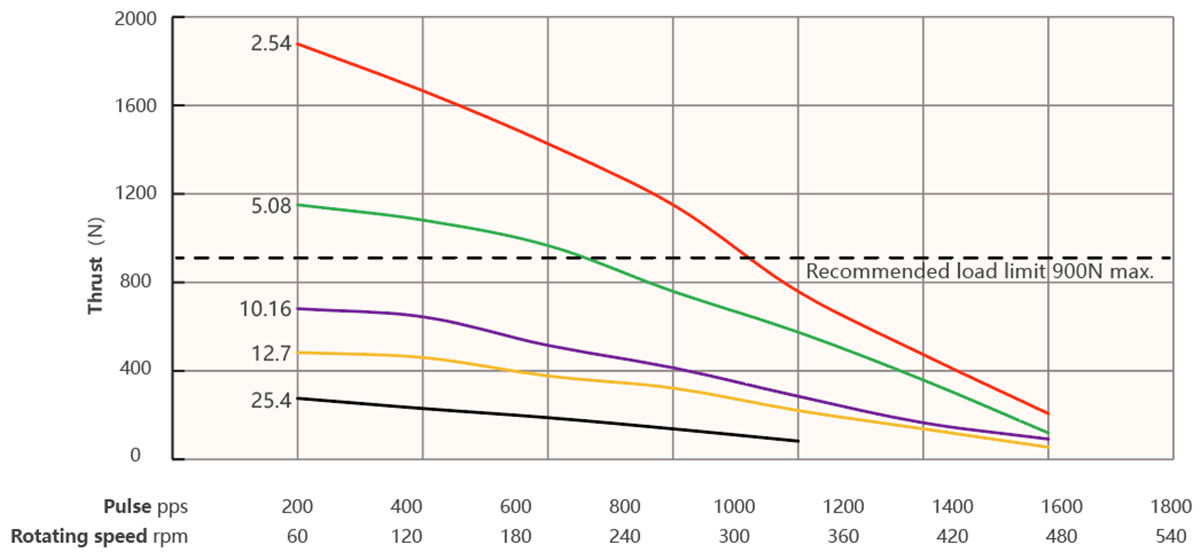
Bipolarer Chopper-Antrieb der Serie 57 mit 75 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ9,525 mm Leitspindel)
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | ||||||||
| 1.27 | 1.27 | 2,54 | 3,81 | 5.08 | 6.35 | 7.62 | 8,89 | 10.16 | 11.43 |
| 2,54 | 2,54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40,64 | 50.8 | 60,96 | 71.12 | 81,28 | 91,44 |
| 25.4 | 25.4 | 50.8 | 76,2 | 101,6 | 127 | 152,4 | 711,8 | 203.2 | 228,6 |
Testbedingung:
Chopper-Antrieb, keine Rampe, halber Mikroschritt, Antriebsspannung 40 V





