
Nema 23 (57 mm) Hybrid-Kugelumlaufspindel-Schrittmotor

>> Kurzbeschreibungen
| Motortyp | Bipolarer Schrittmotor |
| Schrittwinkel | 1,8° |
| Spannung (V) | 2,3 / 3 / 3,1 / 3,8 |
| Strom (A) | 3 / 3 / 4 / 4 |
| Widerstand (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Induktivität (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Anschlussdrähte | 4 |
| Motorlänge (mm) | 45 / 55 / 65 / 75 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 max. |
| Spannungsfestigkeit | 1mA max. @ 500V, 1KHz, 1Sek. |
| Isolationswiderstand | 100 MΩ min. @500Vdc |
>> Beschreibungen

Leistung
Große Tragfähigkeit, geringe Vibration, geringe Geräuschentwicklung, hohe Geschwindigkeit, schnelle Reaktion, reibungsloser Betrieb, lange Lebensdauer, hohe Positionierungsgenauigkeit (bis zu ±0,005 mm).
Anwendung
Medizinische Diagnosegeräte, Life-Science-Instrumente, Roboter, Lasergeräte, Analyseinstrumente, Halbleitergeräte, elektronische Produktionsgeräte, nicht standardmäßige Automatisierungsgeräte und verschiedene Arten von Automatisierungsgeräten
>> Zertifizierungen

>> Elektrische Parameter
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (A) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl Anschlussdrähte | Rotorträgheit (g.cm2) | Motorgewicht (G) | Motorlänge L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4.5 | 4 | 480 | 950 | 75 |
>> 57E2XX-BSXXXX-X-4-150 Standard-Außenmotor-Umrisszeichnung
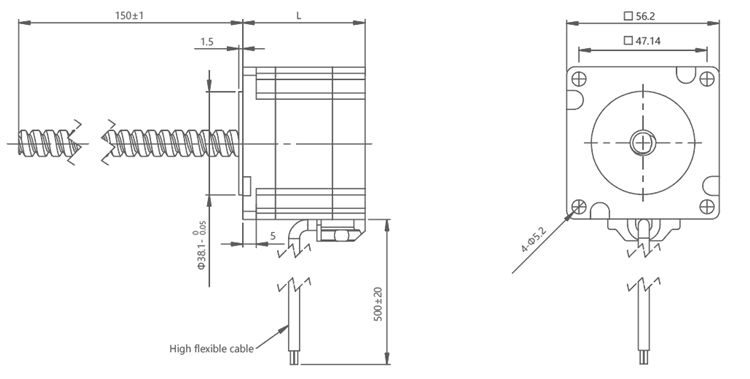
NAnmerkungen:
Die Länge der Leitspindel kann individuell angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
Bitte kontaktieren Sie uns für weitere Spezifikationen für Kugelumlaufspindeln.
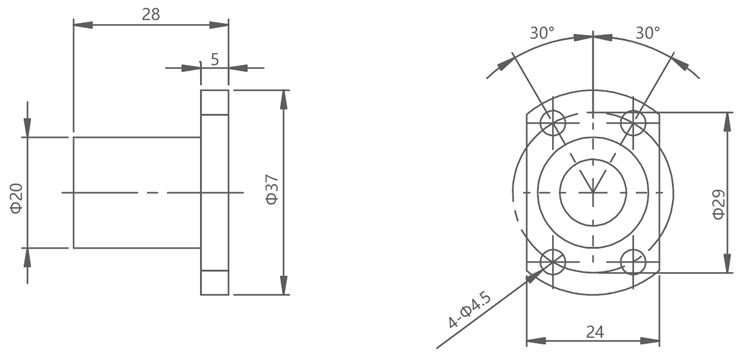
>> Kugelmutter 1202 Umrisszeichnung
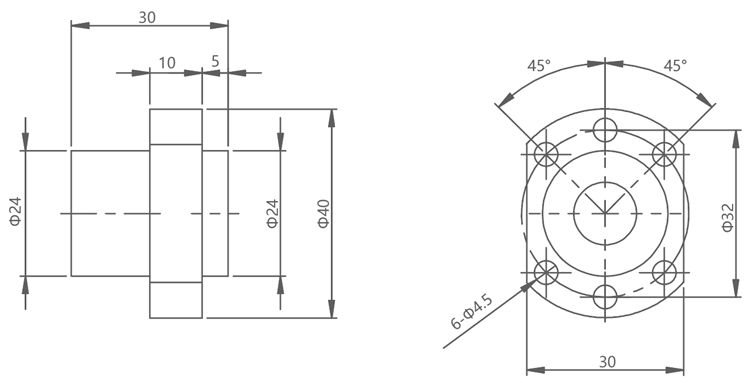
>> Kugelmutter 1205 Umrisszeichnung
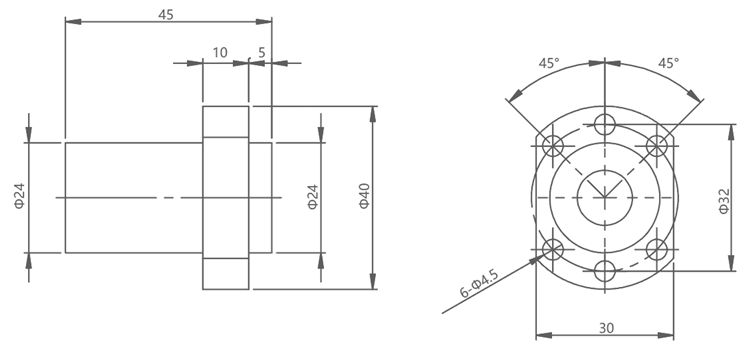
>> Kugelmutter 1210 Umrisszeichnung
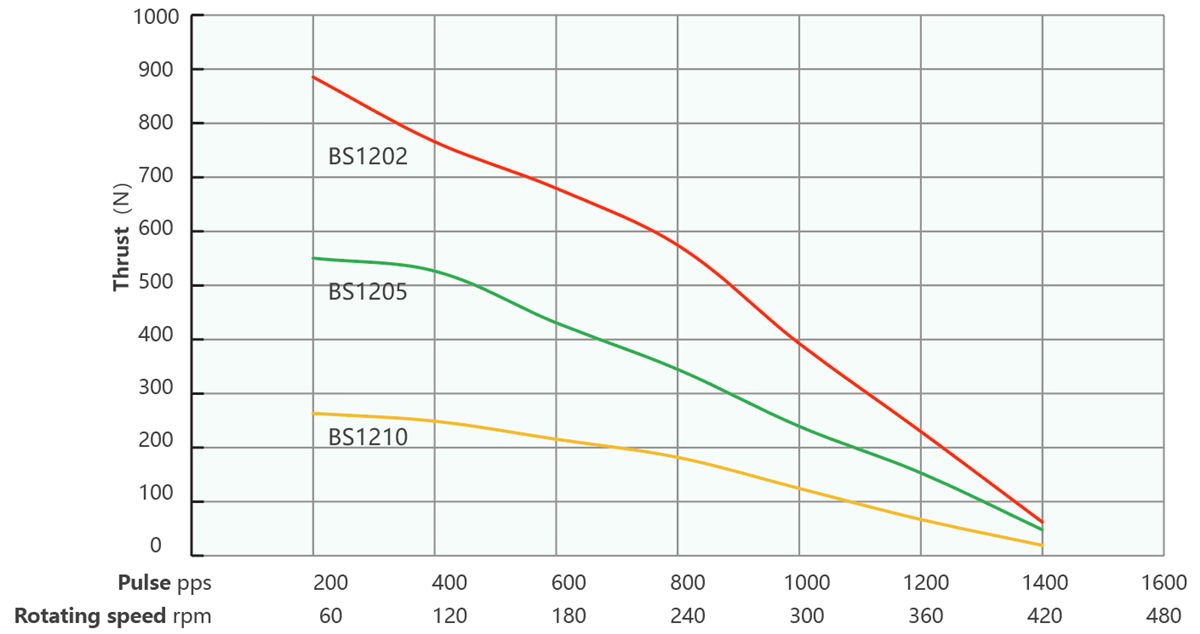
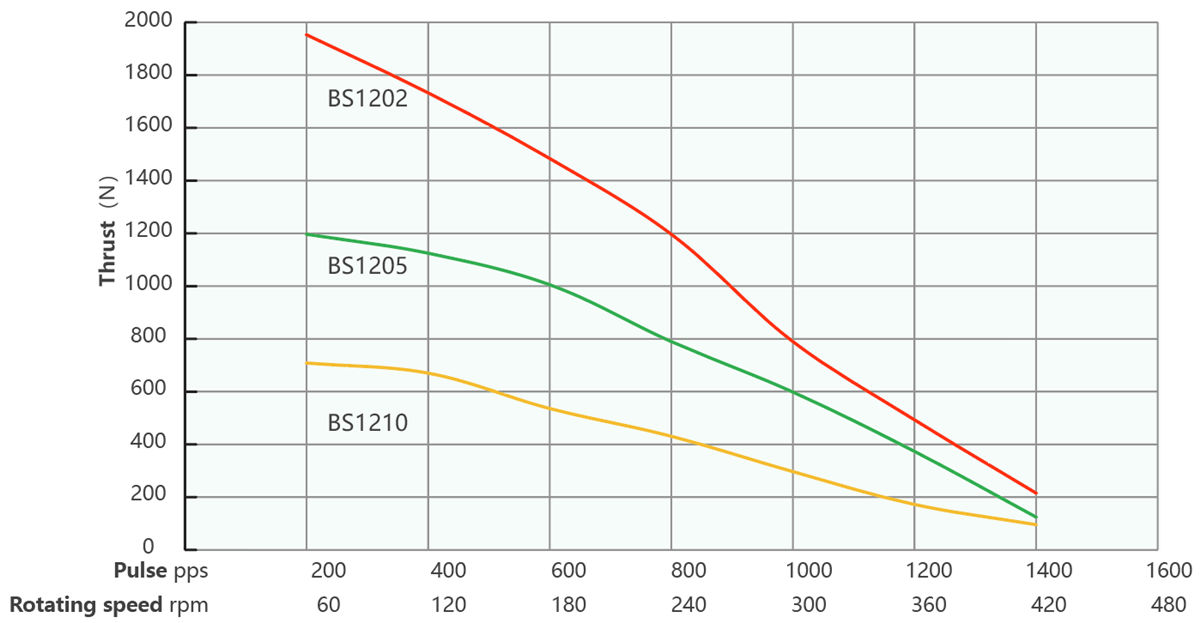
>> Geschwindigkeits- und Schubkurve
Bipolarer Chopper-Antrieb der Serie 57 mit 45 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
Bipolarer Chopper-Antrieb der Serie 57 mit 55 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
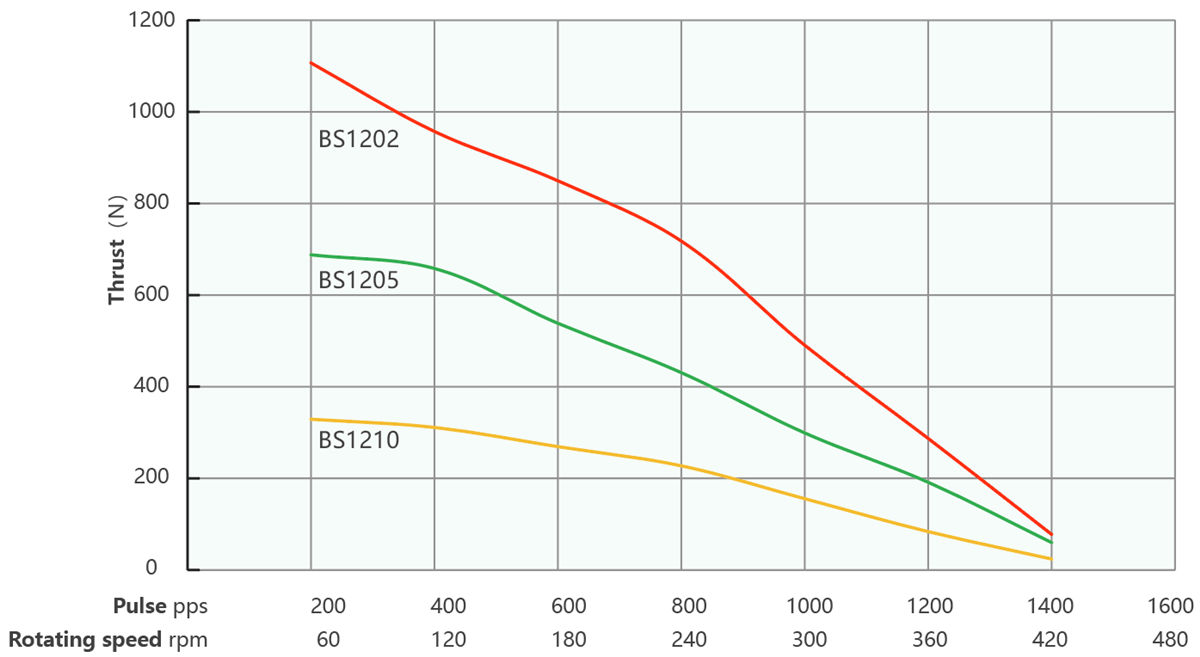
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Testbedingung:
Chopper-Antrieb, keine Rampe, halber Mikroschritt, Antriebsspannung 40 V
Bipolarer Chopper-Antrieb der Serie 57 mit 65 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
Bipolarer Chopper-Antrieb der Serie 57 mit 75 mm Motorlänge
100 % aktuelle Pulsfrequenz und Schubkurve
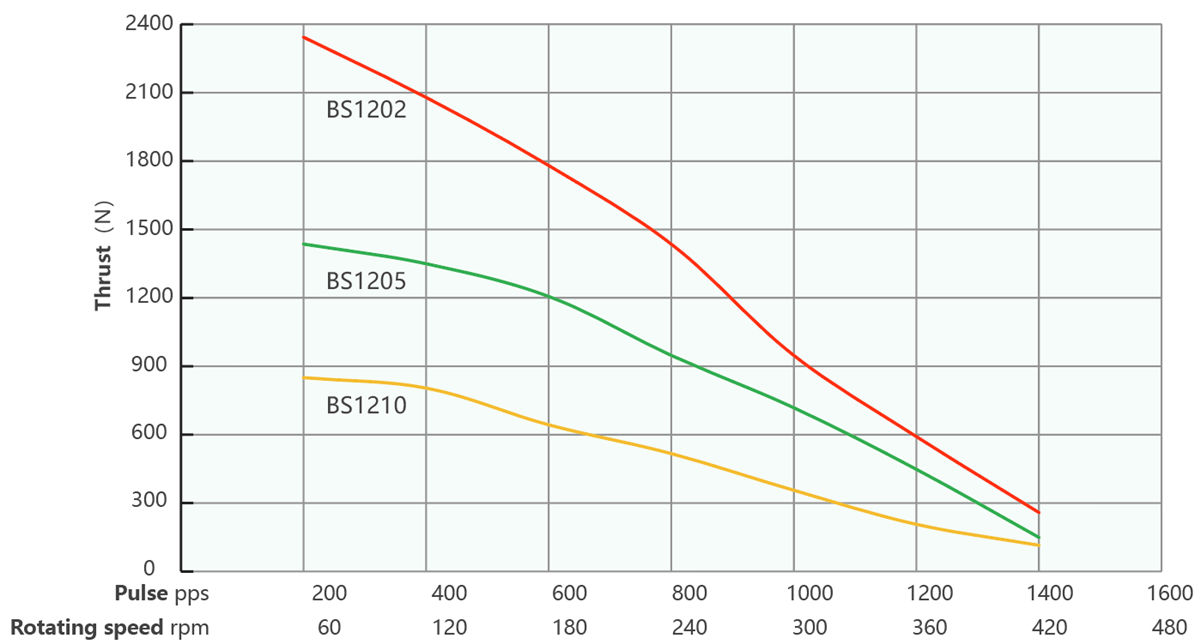
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Testbedingung:
Chopper-Antrieb, keine Rampe, halber Mikroschritt, Antriebsspannung 40 V
Produktkategorien
-

Nema 17 (42 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 24 (60 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 11 (28 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 14 (35 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 34 (86 mm) Hybrid-Kugelumlaufspindel-Schrittmotor
-

Nema 8 (20 mm) Hybrid-Kugelumlaufspindel-Schrittmotor